
Previous: 13.3.3 Extending the Speed Function Up: 13. The Level Set Method Next: 13.5 Finite Difference Schemes
 |
Although in the numeric representation the level set function is eventually calculated on a grid, the resolution achieved is in fact much higher than the resolution of the grid, and hence higher than the resolution achieved using a cellular format on a grid of the same size. This is because in the last step, the surface extraction step, the zero level set is approximated by lines or triangles using linear interpolation. This goes hand in hand with the requirement that the level set function essentially remains the signed distance function which is locally a linear function near the zero level set.
The two-dimensional surface extraction algorithm takes a level set
grid as input and yields a list of points. It starts at the left hand
side of the simulation domain and first finds a vertical edge whose
points have different sign. Then it marches through the grid along
the zero level set remembering the current edge and the current
direction. The next edge which is intersected by the zero level set
is found by considering the sign of the neighboring edges. After
identifying an intersecting edge, the current edge and current
direction are updated and a point on the edge found by linear
interpolation using the values of the level set function at the two
grid points is added to the list of points finally returned. The
algorithm terminates when the boundary of the simulation domain is
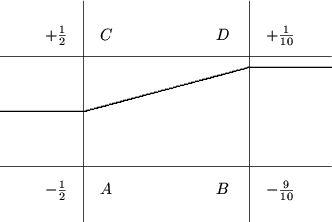
reached. In the example in Figure 13.3 we assume
that the current edge is ![]() going right. The zero of the linear
interpolating function at the edge
going right. The zero of the linear
interpolating function at the edge ![]() is its midpoints.
Considering the edges
is its midpoints.
Considering the edges ![]() ,
, ![]() , and
, and ![]() , the edge
, the edge ![]() must be
intersected by the zero level set and thus we find the next
intersection point, which lies closer to
must be
intersected by the zero level set and thus we find the next
intersection point, which lies closer to ![]() than to
than to ![]() .
.
Voids are detected by finding an edge with points of different sign in the simulation domain first. This edge must not have been extracted previously. The surface extraction algorithm then proceeds in the same manner. The precise shape and location of voids is important for the electrical properties of films deposited (cf. Chapter 12).
Clemens Heitzinger 2003-05-08