|
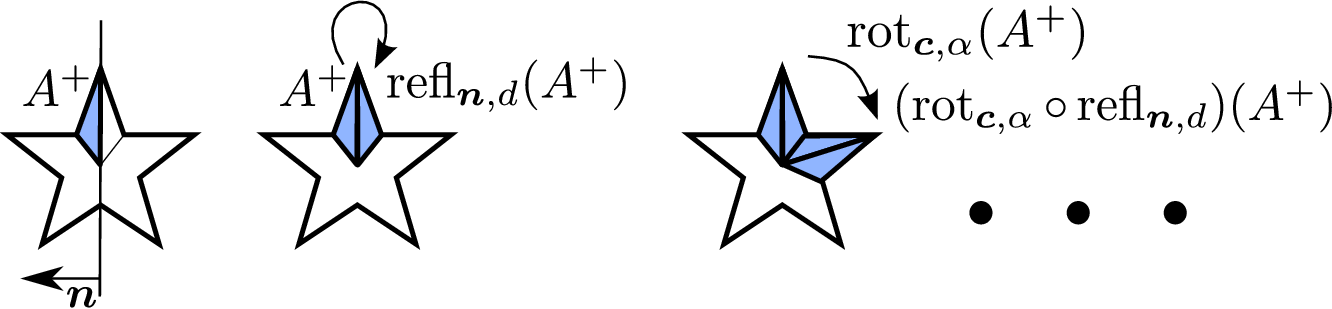
The set  has a rotational symmetry of order five and a reflective symmetry indicated by the hyperplane with the normal vector has a rotational symmetry of order five and a reflective symmetry indicated by the hyperplane with the normal vector  . The subset for the reconstruction process is obtained by using one half of a slice which also has a reflective symmetry. The resulting subset . The subset for the reconstruction process is obtained by using one half of a slice which also has a reflective symmetry. The resulting subset  is then reflected around the reflecting hyperplane and in turn is then reflected around the reflecting hyperplane and in turn  and and
 are rotated as described in Section 6.3. are rotated as described in Section 6.3. |