Next: 2 Geometries and Meshes Up: Dissertation Florian Rudolf Previous: List of Abbreviations Contents
|
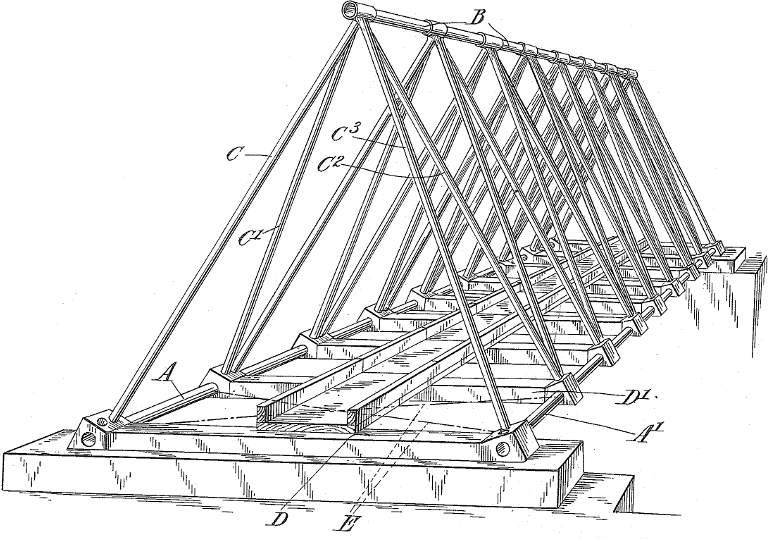
There are multiple parts of this bridge construction, which are similar to each other, for example the bars |
![\begin{subfigure}
% latex2html id marker 1925
[b]{0.35\textwidth}
\centering
\...
...ct_from_smaller_piece}
\caption{Airplane, reflective symmetry}
\end{subfigure}](img131.gif)
![\begin{subfigure}
% latex2html id marker 1932
[b]{0.58\textwidth}
\centering
\...
...struct_from_smaller_piece}
\caption{Star, rotational symmetry}
\end{subfigure}](img132.gif)
The objects can be reconstructed by using smaller pieces, those being one side of the plane and a jag of the star, respectively. The smaller piece is copied and reflected or rotated around the symmetry center to obtain the desired object. |
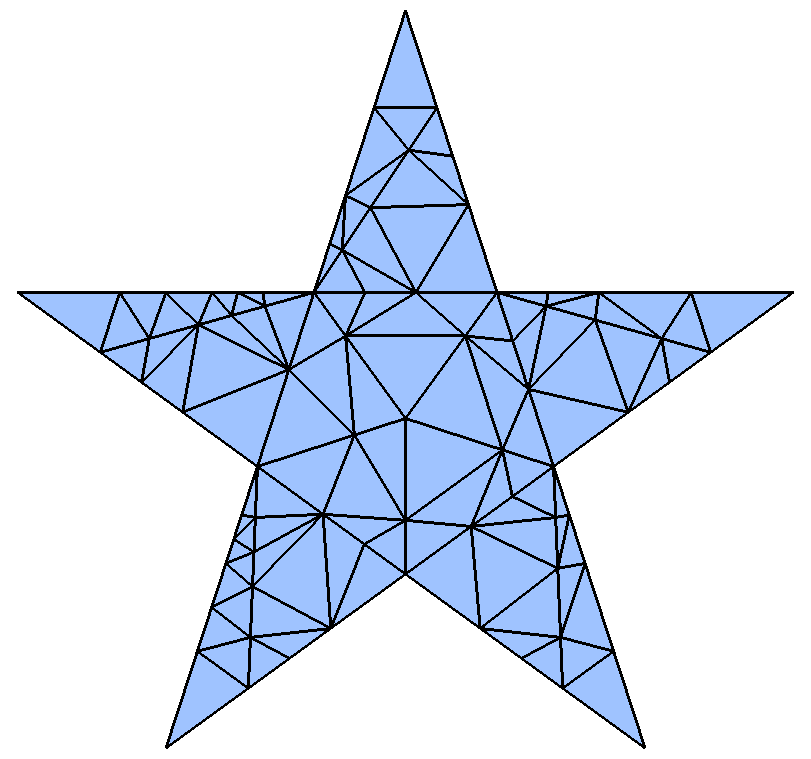
Even though the object itself has a rotational and a reflective symmetry, the mesh has neither. |
![\begin{subfigure}
% latex2html id marker 1976
[b]{0.45\textwidth}
\centering
\...
...res/simple_templated_mesh}
\caption{Conforming templated mesh}
\end{subfigure}](img136.gif)
![\begin{subfigure}
% latex2html id marker 1984
[b]{0.45\textwidth}
\centering
\...
...orming_templated_mesh}
\caption{Non-conforming templated mesh}
\end{subfigure}](img137.gif)
The resulting mesh is obtained by applying the transformation functions on the mesh templates. Non-conformities are visualized by red circles. |
{kind=link}
{kind=link}
{kind=link}