4.2.1 Mesh Generation
Mesh generation divides a physical domain into so-called mesh elements. This particular task
is complemented by mesh adaptation, enabling to change an already existing mesh
according to specific requirements. For instance, geometrical predicates, such as the
element shape, can be used to guide a mesh adaptation step, to ultimately improve
the worst element in a mesh [106]. Aside from geometrical predicates, meshes
can be adapted according to distribution-based tagging mechanisms. For instance,
mesh regions carrying high gradients in quantity distributions, like doping, are higher
resolved ,
to minimize discretization errors [55].
As already indicated, device simulation tools usually receive the simulation domain in form
of a mesh from process simulation tools, accompanied by doping profiles. The meshes
provided by process simulation tools are usually not suited for device simulation, due to
different requirements imposed by a different set of physical model equations. Among the
possible manifestations are highly distorted elements, and insufficiently resolved meshes,
especially in regions where high gradients in the device simulation solutions are expected,
such as doping transitions. Such unsuited meshes may result in slow convergence or in
the worst case in no convergence at all of the solution method used in the device
simulator. This circumstance requires the availability of a meshing facility, allowing either
to adapt the mesh or to generate the mesh from scratch according to extracted
geometry information. However, in this particular case, the initial doping profiles
provided by the process simulator must be interpolated to the new mesh, likely
offering entirely new mesh elements. The interpolation process ensures that the initial
doping distribution is mapped to the new mesh elements, required for the mesh
element-wise assembly of the basic semiconductor equations, like Poisson’s equation
(Equation 4.1).
The use of process simulation tools yielding a mesh including doping informations
may be omitted, for instance, for testing purposes. In this specific case, a device
simulation tool has to work with a bare input mesh generated by mesh generation tools,
such as Netgen [60]. In this context, a bare mesh indicates a mesh without any
device-related information, meaning that although the mesh provides segments
representing the individual parts of a device such as oxides, the mesh object has
no knowledge about the physical relevance. For instance, no material information
is associated with the segments or whether the individual segments represent a
contact, an oxide, or a semiconductor region. Similar to the previous case, where a
mesh is imported from a process simulator, the externally generated meshes usually
lack domain knowledge thus potentially represents an unsuitable mesh, as already
described. The lack of a process simulator requires that a doping profile has to be
assigned to the mesh via, for instance, analytic functions, ultimately enabling to
perform the actual device simulation. Overall, it is therefore essential to interface a
device simulator with meshing facilities, enabling - possibly automatized - mesh
adaptation steps to adapt an externally provided mesh according to domain-specific
information.
Furthermore, so-called template devices are of interest, as they provide convenient,
simulation-ready devices to end users. This template mechanism allows to entirely omit an
external process simulation and mesh generation step, and thus augments the device
simulator with a standalone simulation capability. Such a feature is usually of interest for
showcases, tests, and tutorial-related purposes. These templates provide a specific device
type, such as a two-dimensional metal-oxide-semiconductor field-effect transistor ( MOSFET),
but expose certain customizable device geometry parameters, such as the channel width. To
support a reasonable mesh resolution, the template mechanism has to be coupled with a
meshing backend, allowing to generate a high-quality mesh upon updated end user-provided
geometry parameters. Similar to the previous case describing the application in the context
of an external mesh generation tool, a doping profile has to be distributed on the
mesh.
The three discussed application cases of mesh generation and adaption are characterized
in Figure 4.3. The challenge is to interface the device simulator with mesh generation
facilities, without relying on a single specific meshing backend. For instance, interfacing
directly with Netgen confines the simulator to utilize this specific tool for all mesh
generation and adaptation tasks. However, as already indicated different meshing tools -
aside from supporting different mesh types such as three-dimensional tetrahedral
meshes - implement different algorithms and strategies to generate high quality
meshes. Having access to various meshing backends is especially important to
the field of TCAD, where input geometries, consisting of thin layers and complex
surfaces [107], require high quality mesh generation which is still a matter of ongoing
research.
Also, mesh generation might be prone to scaling issues, induced by, for instance, meshes
defined in the nanometer regime. Such cases involve very small numbers which - if
remained unscaled relative to the device dimensions - might break numerical tolerance
limits in the meshing backend, potentially prohibiting the generation mechanism to
converge. Therefore, it is advantageous to perform the mesh generation step based on a
normalized input, i.e., the mesh is scaled relative to its device dimensions. When
the mesh has been generated, it is scaled to the intended regime. Such scaling
mechanisms are of general interest to all meshing backends, thus these mechanisms
have to be provided in an orthogonal manner, further favoring a unified meshing
layer.
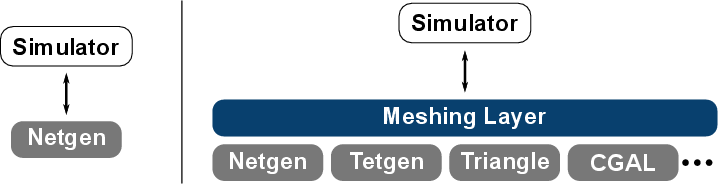
Overall, it is of utmost importance to interface the device simulator with a flexible meshing
layer, in turn enabling access to the actual meshing backends (Figure 4.4). This
way, the meshing tools utilized by the simulator can be exchanged and expanded
without additional development effort. The selection of the actual meshing backends
can be done either manually, driven by the individual properties of the meshing
tools relative to the problem at hand, or automatically, by, for example, heuristical
methods.