Next: 4.2.2 Gradient-based Optimization Up: 4.2 Optimization Strategies Previous: 4.2 Optimization Strategies Contents
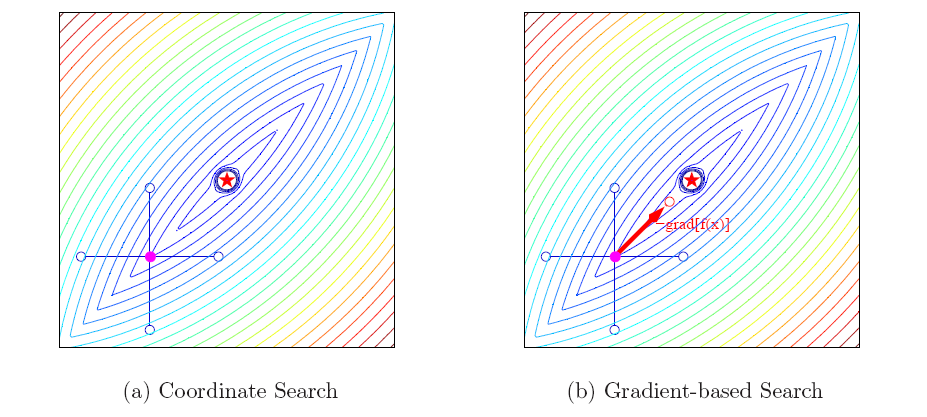
This algorithm starts with an initial guess in the parameter space, at which the score function is evaluated. Based on this location, a small environmental search is started to obtain a better score than for the initial guess. Within this method, the search algorithm selects one point in each parameter axis to check for a better score value (cf. Figure 4.3a). The corresponding search distance from the current base location can be defined in the configuration section of the optimizer. If a better score value is found at a certain point during the local environmental search, this point is selected as the base location for the next environmental search. If no better results can be found in the given environment around the current base location, the search distance for the algorithm is reduced, by a user-defined factor. A common value for this reduction is one half.
|