Next: 5.2 Punktsuche
Up: 5. Geometrische Modellierung und
Previous: 5. Geometrische Modellierung und
Unterabschnitte
Zur Darstellung dreidimensionaler geometrischer Objekte in Computerprogrammen
sind verschiedene Methoden gebräuchlich, die je nach Anwendungsbereich
gewisse Vor- und Nachteile bieten [123,124,125,126].
Die drei am häufigsten verwendeten Darstellungsformen sind
- Boolesche Modelle (CSG=Constructive Solid
Geometry),
- Oberflächendarstellung (BRep=Boundary Representation)
und
- zelluläre Darstellungsformen (CD=Cellular
Decomposition).
Diese Form der Geometrierepräsentation wird häufig in CAD Programmen
zur Konstruktion mechanischer Teile verwendet.
Die geometrischen Grundelemente sind Ebenen, die den Raum in zwei
Hälften (Halbräume) teilen.
Mittels logischer Verknüpfungsoperationen lassen sich damit beliebige
durch ebene Flächen begrenzte Geometrien erstellen.
Abgespeichert wird die Struktur in einem baumförmigen
Graphen, dessen Blätter die Grundelemente darstellen und dessen
innere Knoten entweder logische (UND, ODER, ...) oder
geometrische (Translation, Rotation, ...) Operationen bedeuten.
Beispielsweise lässt sich ein Quader als UND-Verknüpfung
(Durchschnitt) von sechs Halbräumen darstellen
(siehe auch Abb. 5.1).
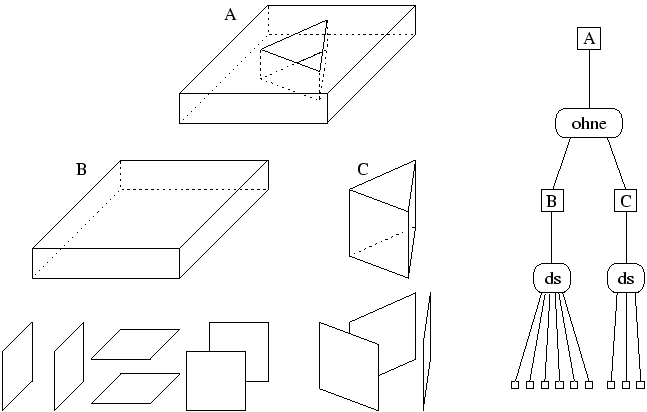
Abbildung 5.1:
Konstruktion einer
CSG Geometrie: Ein Quader (B) wird als Durchschnitt
(ds) von sechs Halbräumen gebildet, das (unendlich lange) dreieckige
Prisma (C) aus drei Halbräumen.
Mit der Operation ,,B ohne C`` wird ein Quader
mit einem dreieckigen Loch (A) konstruiert.
|
|
Für Oberflächen quadratischer Ordnung kann man als Grundelemente zusätzlich
zu den Halbräumen noch die Kugel, den (unendlich langen) Zylinder und
den Torus verwenden.
Im Prinzip können auch andere Oberflächen wie z.B.
Splineflächen als Grundelement verwendet werden.
Eine notwendige Bedingung ist allerdings, dass die Flächen entweder
geschlossen sind
oder unendliche Ausdehnung haben, sodass der Raum eindeutig in ein
inneres und ein äußeres Gebiet aufgeteilt wird.
Das Erzeugen der Kanten und Eckpunkte der Geometrie ist mit großem
Rechenaufwand verbunden, da hiezu alle
Grundelemente untereinander verschnitten werden müssen.
Hingegen ist es relativ einfach festzustellen, ob ein (beliebiger) Punkt
innerhalb oder außerhalb der Geometrie liegt (Punktsuche).
Dazu wird für jedes Grundelement getestet, ob der Punkt innerhalb oder
außerhalb liegt.
Die Ergebnisse der Einzeltests werden dann anhand des Graphen logisch
verknüpft.
Bei der Oberflächendarstellung (Boundary Representation) bilden
die Eckpunkte, die durch ihre Koordinaten
gegeben sind, die Basis der Geometrie--im Gegensatz zu CSG,
wo die topografische Information durch Ebenengleichungen
festgelegt ist.
Ausgehend von den Punkten ist der Aufbau streng hierarchisch (siehe auch
Abb. 5.2).
So ist eine Kante durch zwei Eckpunkte definiert,
Flächen sind durch die Kanten, die den Rand bilden, gegeben.
Zu beachten ist dabei, dass Flächen mit Löchern nicht nur einen äußeren,
sondern auch einen oder mehrere innere Ränder haben.
Körper (Solids) sind durch ihre Randflächen festgelegt.
Sie haben genau einen äußeren Rand, können aber auch innere Ränder
besitzen (Hohlräume oder Einschlüsse).
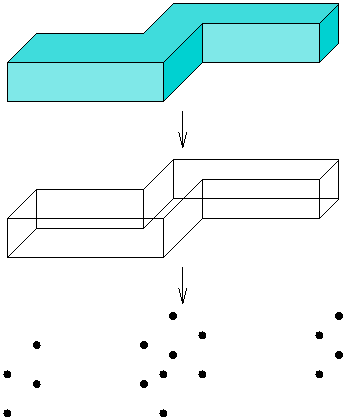
Abbildung:
Streng hierarchischer Geometrieaufbau
der Oberflächenrepräsentation: Körper werden durch
ihre Randflächen
festgelegt, die wiederum sind durch ihre Randlinien gegeben, welche
durch jeweils zwei Punkte definiert sind.
|
|
Während es bei CSG-Geometrien keine Probleme mit Datenkonsistenz
gibt (jede beliebige darstellbare Geometrie ist eine gültige Geometrie),
muss bei der Oberflächendarstellung streng auf topologische und
topografische Konsistenz geachtet werden.
Um topologische Konsistenz zu erreichen, muss garantiert sein, dass
- Linien mit genau zwei Punkten verknüpft sind,
- Flächen zu nicht mehr als zwei Solids gehören,
- die Berandung(en) von Flächen und Solids geschlossen ist (sind), und
- Solids und Flächen genau einen äußeren Rand haben.
Für topografische Konsistenz wird gefordert, dass
- die Berandung von Flächen in einer Ebene liegt,
- keine Verschneidungen auftreten,
- Solids, die sich in einem Punkt, Linie oder Fläche berühren,
auch im Datenformat diesen Punkt, Linie oder Fläche gemeinsam haben,
- wenn mehr als 3 (bzw.. 2) Ebenen im Datenformat einen Punkt (eine Linie)
gemeinsam haben, sie sich auch tatsächlich in diesem Punkt (dieser Linie)
schneiden.
Manche Operationen können daher nur unter bestimmten Voraussetzungen oder
in Kombination mit anderen ,,passenden`` Operationen durchgeführt werden.
So darf beispielsweise eine Fläche, die zwei Solids trennt, nicht gelöscht
werden, außer man verbindet gleichzeitig die Solids miteinander.
Aber auch bei an sich korrekten geometrischen Operationen muss immer darauf
geachtet werden, dass nicht etwa durch numerische Ungenauigkeiten
Inkonsistenzen entstehen.
Umgehen kann man dieses Problem durch Verwendung einer exakten rationalen
Arithmetik.
Dabei handelt man sich aber wieder den Nachteil ein, dass einerseits die
Ausgangsdaten selten in einem rationalen Format vorliegen und es dadurch
bei der Konvertierung zu topologischen Inkonsistenzen kommen kann und
andererseits, dass gewisse geometrische Operationen dadurch unmöglich gemacht
werden (z.B. Rotation).
Bei den zellulären Darstellungsformen wird die Geometrie aus einfachen
dreidimensionalen Grundelementen (z.B. Tetraeder oder Würfel)
zusammengesetzt.
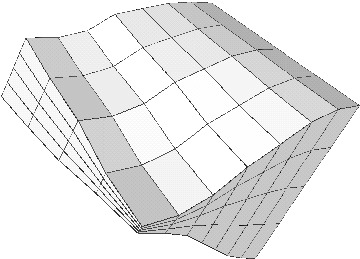
Dabei kann man zwischen strukturierten
und unstrukturierten Gittern unterscheiden.
ist weder die Anordnung der Knotenpunkte
noch der Gitterelemente einer bestimmten Regelmäßigkeit unterworfen
(siehe Abb. 5.3).
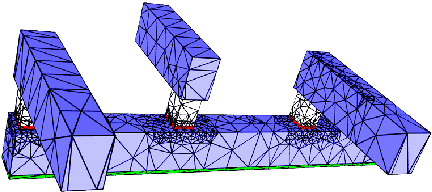
Abbildung 5.3:
Ein unstrukturiertes Tetraedergitter
|
|
Abgespeichert wird ein unstrukturiertes Gitter durch eine Punktliste
und eine Elementliste. Die Punkte sind durch ihre Koordinaten gegeben,
die Elemente referenzieren ihre Knoten durch Indizes auf die Punktliste.
Bei Gittern mit verschiedenen Grundelementen muss zusätzlich noch der
jeweilige Elementtyp angegeben werden.
sind topologisch regelmäßige Hexaedergitter.
Jeder Gitterpunkt und jede Zelle kann durch ein Indextripel  eindeutig identifiziert werden.
Als Beispiel seien die Gitter der Finiten Differenzen Methode erwähnt
(siehe auch Abb. 5.4).
eindeutig identifiziert werden.
Als Beispiel seien die Gitter der Finiten Differenzen Methode erwähnt
(siehe auch Abb. 5.4).
Abbildung 5.4:
Ein strukturiertes Gitter
|
|
Bei strukturierten Gittern brauchen die Elemente nicht explizit abgespeichert
werden, da ihre Eckpunkte direkt in der Punktliste mit den drei
Richtungsindizes gefunden werden können.
sind strukturierte Gitter bei denen
nicht nur die Topologie der Zellen sondern
auch die Koordinaten der Gitterknoten einer Regelmäßigkeit unterliegen.
Jede Gitterzelle sowie das Gesamtgitter hat Parallelogramm- (2D)
bzw. Spatform (3D).
Jeder der drei Gitterindizes unterteilt eine Hauptachse des Gitters
in sogenannte Ticks.
Fallen die Hauptachsen mit den Achsen des Koordinatensystems zusammen,
spricht man von einem rectilinearen Gitter (Abb. 5.5a).
oder auch kartesisches Gitter genannt (Abb. 5.5b), gilt zusätzlich,
dass alle Zellen gleiche Abmessungen haben.
Ein Voxelgitter ist durch Angabe des Koordinatenursprungs, der
Breite/Höhe/Tiefe einer Zelle sowie der Anzahl
der Zellen in  ,
,  , und
, und  -Richtung vollständig definiert.
-Richtung vollständig definiert.
Abbildung 5.5:
Rectilineares Gitter (a) und Voxeldarstellung (b) als
Spezialfälle strukturierter Gitter
![\centerline{%
\begin{minipage}[t]{0.4\textwidth}\centerline{\hss\resizebox{\line...
...h}{!}{\includegraphics{voxel}}\hss}
\vspace{5pt}\centerline{(b)}\end{minipage}}](img413.png) |
Generell ist man mit Ortho-Produkt-Gittern sehr stark in der Darstellung
allgemeiner Geometrien eingeschränkt.
Für nicht hexaederförmige Strukturen muss man
für jede Gitterzelle eine Boolesche Variable abspeichern, die angibt
ob die jeweilige Zelle zur Geometrie gehört oder nicht.
Kommen mehrere Materialien vor, so verwendet man stattdessen eine
Indexvariable, die das entsprechende Material anzeigt (oder Vakuum,
falls die Zelle nicht zur Geometrie gehört).
Flächen, die nicht zu den Gitterachsen parallel sind, können lediglich
stufenförmig angenähert werden.
Damit durch die Diskretisierung nicht kleine geometrische Details verloren
gehen, muss man die Gitterdichte ausreichend hoch wählen (Abb. 5.6).
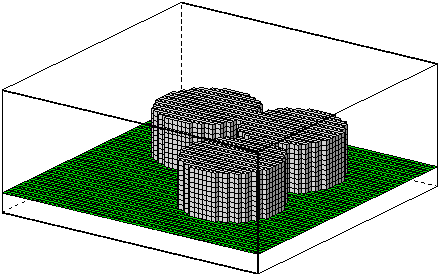
Abbildung 5.6:
Geometrie in Voxeldarstellung: Flächen,
die nicht zu den Koordinatenachsen parallel sind müssen stufenförmig
angenähert werden.
|
|
Bei der Voxeldarstellung kann man zur Reduktion des Speicherbedarfs
die Tatsache, dass benachbarte Zellen mit hoher Wahrscheinlichkeit
aus dem selben Material sind, ausnutzen, um eine komprimierte
Darstellung zu erzielen z.B. mittels eines
Octree oder mittels Lauflängencodierung.
Ähnlich wie beim CSG-Modell ist jede darstellbare Voxel-Geometrie auch
automatisch gültig, was sich natürlich positiv auf die Robustheit
voxelbasierter Algorithmen auswirkt.
Fußnoten
- ... Voxeldarstellung5.1
- Voxel
 Volume
Element, in Analogie zu Pixel.
Volume
Element, in Analogie zu Pixel.
Next: 5.2 Punktsuche
Up: 5. Geometrische Modellierung und
Previous: 5. Geometrische Modellierung und
R. Sabelka: Dreidimensionale Finite Elemente Simulation von Verdrahtungsstrukturen auf Integrierten Schaltungen