|
|
|
|
Previous: 3.3.2.1 Euler's Angles Up: 3.3.2 Coordinate System Transformation Next: 3.3.2.3 Tensor Transformations |
|
|
|
|
Previous: 3.3.2.1 Euler's Angles Up: 3.3.2 Coordinate System Transformation Next: 3.3.2.3 Tensor Transformations |
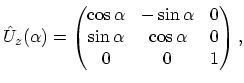 |
(3.41) |
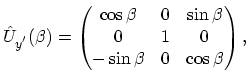 |
(3.42) |
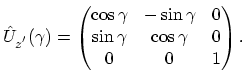 |
(3.43) |
 |
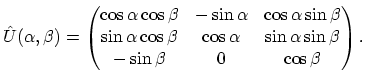
(3.44) |
 |
(3.45) |