Mesh adaptation procedures in general can be grouped into three different methods,
depending on the level of mesh modifications. As discussed in [34]
these groups are named r-, p-, and h-methods. Where in the
following r- and p-methods are just discussed briefly,
h-techniques for tetrahedral meshes are examined in detail.
Using the r-method, the mesh connectivity is unchanged. Instead, node
relocation is used to move the mesh nodes, either by means of weighted
barycentric smoothing based on the location and the weight of the nodes
in some neighborhood, or by means of element distortion. The criteria
(weights) governing these operations are obtained by analyzing the local mesh
quality not only in a geometric sense, also rules for different discretization
schemes can be used. For this method the mesh modification level is normally low,
so the r-method is used as a ``mesh fine tuning'' method.
The p-method approach is based on an invariant mesh (in terms of
points (nodes, vertexes) and elements) and adjusts the degree (in terms of the
interpolation functions) of the used discretization scheme constructed on the mesh
elements as a function of the current solution analysis. This method is very
popular for finite element discretization where also mixed forms of
p-, and h-methods are in use. An overview of basic
principles and properties for p- and for hp-methods is given
in [35]. Introductory concepts for linear and second order approximation
schemes, which are subsets of general polynomial approximations are discussed
in Section 3.1.3.
Adaptation by the h-method is defined in terms of local or global mesh
enrichment by means of refining (by partitioning) or coarsening selected
elements or all elements in a mesh.
The following deals mostly with three-dimensional simplex partitioning based
on the so-called tetrahedral bisection method. In addition, an overview
is given of a more general class of adaptation processes, the so-called
vertex insertion methods. Higher h-adaptation methods like
the red-green refinement methods or the ![]() -dimensional extension of
the
-dimensional extension of
the ![]() algorithm can be found in literature [36,37,38],
but these methods are not subject of further discussions.
algorithm can be found in literature [36,37,38],
but these methods are not subject of further discussions.
To achieve local three-dimensional simplex partitioning three configurations of inserting a new vertex (node) are possible [4]. It is likely to define a new vertex along an edge, on a face, or inside a tetrahedron as depicted in Figure 2.1.
![\begin{figure*}\setcounter{subfigure}{0}
\centering
\subfigure[Initial tetrahedr...
...ns.]
{\epsfig{figure=pics/4_sp_tets.eps2,width=0.24\textwidth}}\end{figure*}](img124.png) |
Depending on the location of the new vertex, the initial tetrahedron is split into two, three, or four tetrahedra respectively, where the last case (see Figure 2.1(d) and Figure 2.1(h)) does not influence neighboring tetrahedra at all. For a new vertex located on a face (see Figure 2.1(c) and Figure 2.1(g)) the spatial influence of the portioning process is limited to the face neighbor of the initial tetrahedron which is also split into three pieces just in a mirrored way. For the first case (see Figure 2.1(b) and Figure 2.1(f)), where a new vertex is located on an edge of an initial tetrahedron the influence can not be simple predicted since the whole edge batch, i.e. all tetrahedra which share the edge of the new vertex, are influenced and split into two pieces. This local partitioning method is therefore called tetrahedral bisection which is subject of Section 2.2.2.
Tetrahedral bisection is a special kind of h-method adaptation where
only mesh refinement by inserting a vertex on an edge, the so-called
refinement edge, is allowed [39]. According to
Figure 2.1, this is the most left case (Figure 2.1(b)
and Figure2.1(f)), where the original
tetrahedron is split into two new ones, the algorithm is therefore called
tetrahedral bisection. In the literature,
one can find different improvements and specifications for this algorithm,
e.g. in [40], however, one common problem is how to detect a particular
edge, the refinement edge, as supporter for the new vertex. In a mesh,
tetrahedrons are not isolated and inserting a new vertex influences the whole
edge batch of the refinement edge, if the conformity of the mesh after
the refinement step should be kept, which is normally the
case. Figure 2.2 shows a constellation of four tetrahedrons.
For the refinement edge, the bold red line in the middle was chosen. After
insertion of the new vertex the refined constellation carries, in this example
case, eight tetrahedra.
![\begin{figure*}
% latex2html id marker 1146
\setcounter{subfigure}{0}
\centering...
...ertex.]
{\epsfig{figure=pics/8_init.eps2,width=0.24\textwidth}}\end{figure*}](img125.png) |
The selection process of a particular refinement edge influences the element
shape of the refined constellation in a very strong way. Different element
shape measures are used for the evaluation of the element quality [41]
after tetrahedral bisection not only in a geometric way, also based on demands
of different discretization schemes and applications. For instance in
Section 4, the bisection algorithm is controlled by the
simulation of a diffusion process whereby the accuracy of the simulation is
improved through mesh refinement.
One very common variant of the bisection algorithm is the so-called
longest edge bisection method [42]. The basic idea is to choose
the longest edge of a triangle or tetrahedron as refinement edge to optimize
the shape of the refinement element. In general,
elements become more isotropic and therefore, obtuse face angles
can be avoided, which has a positive impact to a discretization scheme of
finite elements [43]. One has to keep in mind that for general
constellations the refinement edge is not necessary the longest edge of
all involved mesh elements. Such configurations can be treated in a special way
or ignored if higher geometric element distortions are welcome.
One method to handle configurations where the refinement edge is not the longest
edge of all involved tetrahedra is the so-called recursive tetrahedral
bisection approach. This method
can be used to avoid higher distorted elements, on the other hand, this
characteristic is paid with a violation of the refinement locality, i.e. in a
recursive tetrahedral bisection algorithm the locality of the refinement
procedure is no longer guaranteed. A second counterbalance is that special care
has to be taken on the termination of the algorithm since endless recursion is
possible. The basic concepts of this method are
subject of the following section, an extension of this algorithm for volitional
geometrically distorted elements is presented in Section 2.3.2.
For further investigations it is useful to introduce a new term for tetrahedral meshes, which defines an exceptional relation between neighboring tetrahedra [44].
In Section 2.2.2 (see Figure 2.2) a constellation is shown, where the Euclidian length was chosen for the specification of the refinement edge, i.e. that the longest edge of each tetrahedra is marked as refinement edge. In this particular case the refinement edges of all tetrahedra are identical, so Definition 11 holds and therefore the batch is said to be compatibly divisible. More challenging is the case of non-compatibly divisible tetrahedra batches and the transformation into compatibly divisible configurations via recursive tetrahedral bisection which is part of the following.
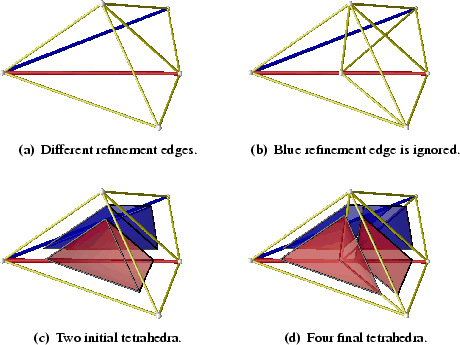 |
Figure 2.3(c) shows two tetrahedra colored red and blue in a
neighboring relation, where the corresponding edge representation is given in
Figure 2.3(a). For the refinement
edge of each tetrahedron simple the edge with the longest Euclidian length was
chosen and colored according the colors of the belonging tetrahedra. So one can
see that the constellation depicted in Figure 2.3 does not fulfill
Definition 11 because the red and the blue refinement edges are not
identical and therefore this configuration is non-compatibly
divisible.
Using tetrahedral bisection (see Section 2.2.2) and starting
randomly with the red tetrahedra and ignoring the neighboring constellation
(blue tetrahedron) yields to four tetrahedra depicted in Figure 2.3(b)
and Figure 2.3(d) jointly. Focused on the new two blue tetrahedra, it
is clear that the left one is more prolated than the nearly regular initial blue
one. This kind of distortion is characteristic for tetrahedral bisection.
![\begin{figure*}\setcounter{subfigure}{0}
\centering
\subfigure[Different refinem...
...]
{\epsfig{figure=pics/RC-rec-tets.eps2,width=0.315\textwidth}}\end{figure*}](img127.png) |
Figure 2.4 shows the evolution of the so-called recursive
tetrahedral bisection approach. Once again we start in the same constellation
as shown in Figure 2.3, with two tetrahedra in a
non-compatibly divisible configuration and the red tetrahedron is randomly
chosen for the first refinement step. A compatibly divisible test shows, that
the neighboring blue tetrahedron does not fulfill Definition 11 and
so we chose the violating tetrahedra (the blue one) as first refinement
tetrahedra. For the blue tetrahedron Definition 11 holds, because the
refinement edge is part of the boundary of the domain and can therefore be used
for a tetrahedral bisection step. The result of this process is shown in
Figure 2.4(b) and Figure 2.4(e) jointly. Now there is only
one refinement edge left (the red one) where once again a compatibly divisible
test is carried out. Now the test allows to use the red refinement edge,
because all influenced tetrahedra fulfill Definition 11. The final
result is shown in Figure 2.4(c) and Figure 2.4(f),
respectively, which holds five tetrahedra, three blue and two red ones. The
three blue ones become more regular than the two blue ones produced by
obstinate tetrahedral bisection as shown in Figure 2.3. It is in the
nature of this algorithm to avoid highly prolated elements if the Euclidian
length is used for the specification of the refinement edge.
For more general configurations where more than two tetrahedra are involved, the refinement mechanism for violating tetrahedra (blue one first) can be repeated as long as they exist. This repetition can be expressed through a recursive definition which yields the term recursive tetrahedral bisection [45].
The choice of the longest edge as refinement edge criterion used during
recursive tetrahedral bisection appears to be good from a geometrical point of
view, since the upcoming mesh elements become more regular. On the other hand side,
the depth of the recursion can become very deep, especially in the case of poor
regular mesh elements, where no unique longest edge can be detected, and the
refinement edge must be chosen randomly. Also the worst case, endless
recursion cannot be detected a priori and deterministicly avoided. This
notice yields a limitation of the recursion depth to an adjustable limit.
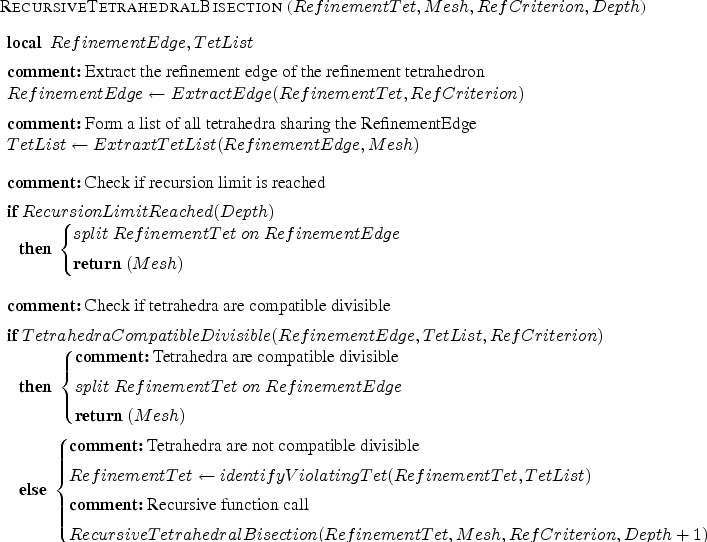
Table 2.1 gives a pseudo-code fragment which shows the nature of the recursive tetrahedral bisection algorithm where the limitation of the recursion depth also has been taken under consideration.
In Section 2.3.2 the influence of a non-constant metric for the calculation of an edge's length is investigated, which broadens the abilities of recursive tetrahedral bisection dramatically. But first a closer look on defining a metric and incorporate the capacity of anisotropy is necessary.