3.1.4 Basis Functions and Domain Partitioning
In principle, there are no restrictions to choose the basis functions of the space  .
Nevertheless, the complexity of the linear system (3.14) is defined by them. The quality of
the approximated solution
.
Nevertheless, the complexity of the linear system (3.14) is defined by them. The quality of
the approximated solution  is expected to increase with the increased dimension of
is expected to increase with the increased dimension of  [59]. Thus, good approximations lead to big matrices (A) and consequently to the increase
in the computational costs of solving (3.14). From a pragmatic point of view, a sparse
matrix A would diminish the computational burden of a high-dimensional
[59]. Thus, good approximations lead to big matrices (A) and consequently to the increase
in the computational costs of solving (3.14). From a pragmatic point of view, a sparse
matrix A would diminish the computational burden of a high-dimensional  space. An
ingenious choice of basis function should create sparse matrices while keeping the
requirements for a good approximation.
space. An
ingenious choice of basis function should create sparse matrices while keeping the
requirements for a good approximation.
Polynomial piecewise functions are the most traditional choice for basis functions in FEM
[56][57]. They are defined in a particular way such that the domain needs to be partitioned
as in Fig. 3.3. Each partition is known as a finite element (the origin of the method name).
In each element, a set of basis function is defined according to the following criteria
[57]:
- It assumes a non-zero value at a node i. In all other nodes the function is zero.
Therefore, one function per node.
- It vanishes over all the elements which contain the node i, following the
established polynomial rule.
- It must be an element of
 , therefore it must be continuous and must have
the first derivative be piecewise continuous.
, therefore it must be continuous and must have
the first derivative be piecewise continuous.
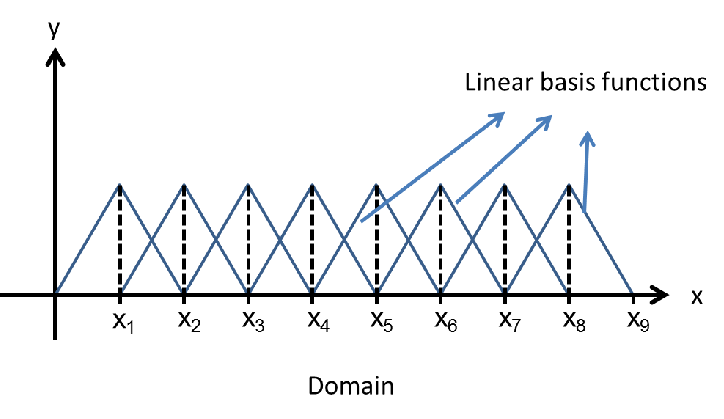
This guidance enables the creation of sparse matrices and simplifies the post-processing of
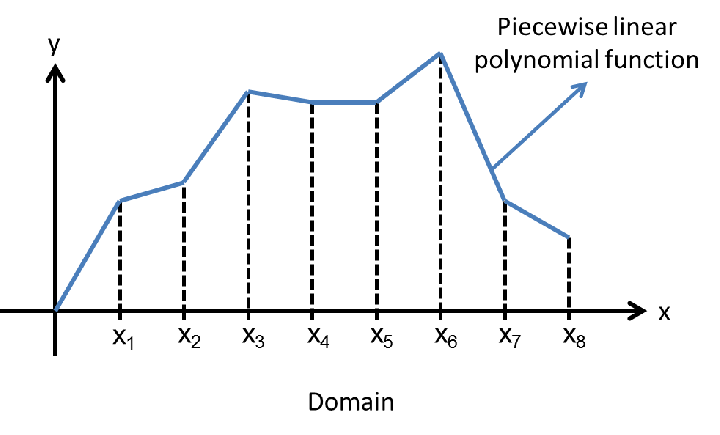
the solution. In Fig. 3.2 a linear piecewise basis function is depicted, which was constructed
following the aforementioned criteria.
The construction of basis functions has been a process developed and refined along the years
to minimize the computational costs of FEM [57]. It is clear from the criteria that the
pattern of the basis function will repeat along the elements. The polynomial in Fig. 3.3 can
be generated by linear basis functions as in Fig. 3.2.
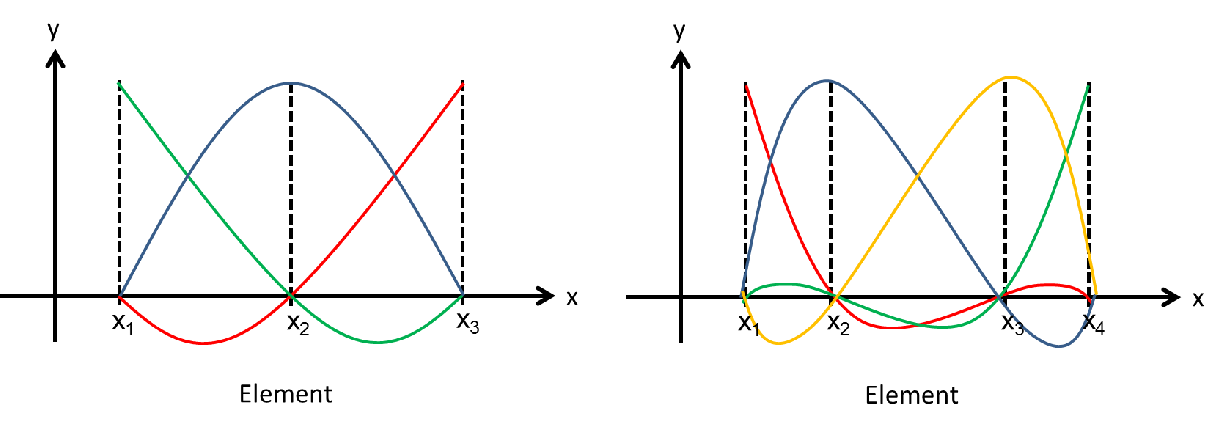
Usually, nodes are defined by the boundaries of the element, but some basis functions may
require additional nodes. Those points do not define the boundaries, instead they are used
as control points. Higher degree polynomials basis functions are created in this fashion,
while they also must follow the criteria. In Fig. 3.4, basis functions with quadratic and
cubic polynomials are exemplified.
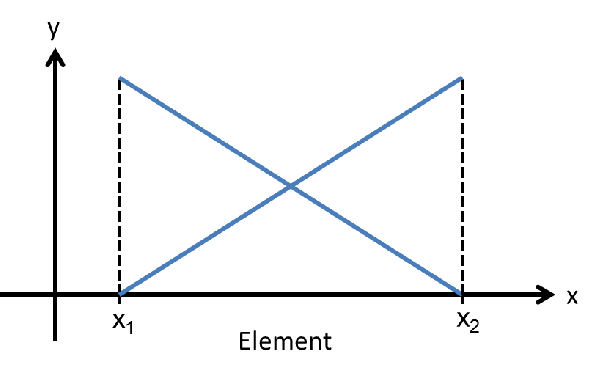
As sample application, consider the partition of the BVP problem (3.1) discussed so far. Let
linear piecewise polynomials be the basis functions as in Fig. 3.1. Analytically, the linear
piecewise basis function can be defined by
![(
{ 1∕hj [xj− 1,xj]
ϕj = (− 1∕hj+1 [xj,xj+1 ] ,
0 (x < xj−1)∪ (x > xj+1)](diss277x.png) | (3.15) |
where  is the size of the element as described in Fig. 3.2. As seen before, the discrete
variational formulation of the BVP problem leads to the linear system (3.14). In order to
solve the system, a computation of
is the size of the element as described in Fig. 3.2. As seen before, the discrete
variational formulation of the BVP problem leads to the linear system (3.14). In order to
solve the system, a computation of  is required. For the basis functions employed
here this task is straightforward. If
is required. For the basis functions employed
here this task is straightforward. If  then
then  , since whenever
, since whenever
 or
or  or
or  the solution is zero. In the cases of
the solution is zero. In the cases of  the
integration result for
the
integration result for  is given by
is given by
 | (3.16) |
while the result for  and
and  is given by
is given by
 | (3.17) |
Assuming a homogeneous partition of the domain ( ) (3.14) can be rewritten
as
) (3.14) can be rewritten
as
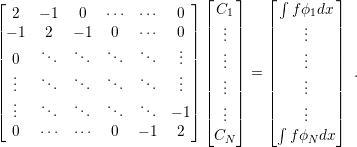 | (3.18) |
The linear system (3.18) is the final discretized form of the original BVP problem (3.1). The
matrix is sparse due to the choice of the basis functions, and it is also symmetric, which is a
great advantage for computing the solution of the system. Symmetry is a desirable property
which is very dependent on the problem, but the right choice of the basis functions can
ensure it for the linear system.
The development made so far is only suitable for differential equations in the same form as
described in (3.1), including the boundary conditions. The problem (3.1) is rather common
in nature. Heat transfer, elasticity, and electrostatics are examples of phenomena described
by it. The choice here was motivated by the use of (3.1) for different fields and the
importance to the models used in this work. Naturally, another differential equation will
lead to another variational form. However, the idea remains the same: to multiply it by a
function of the space  , to integrate it over the domain, to discretize it by
, to integrate it over the domain, to discretize it by  ,
to partition the domain, to choose the basis functions, and finally to solve the
system, summarizing the steps for finding a solution using the Finite Element
Method.
,
to partition the domain, to choose the basis functions, and finally to solve the
system, summarizing the steps for finding a solution using the Finite Element
Method.
Considerations for 2D and 3D Cases
For 2D and 3D problems the procedure is the same, while the mathematical semantics and
operations (derivatives and integrations) must be adapted for the proper dimension. The
main difference lies in the partitioning of the domain, which can be split in different
ways. The creation procedure of a partition is called meshing and the resultant
domain division is a mesh. There are several algorithms available for meshing,
however, the vast majority of them creates triangular or quadrilateral meshes for 2D
domains and tetrahedral and quadrilaterally-faced hexahedral meshes for 3D domains
[60].
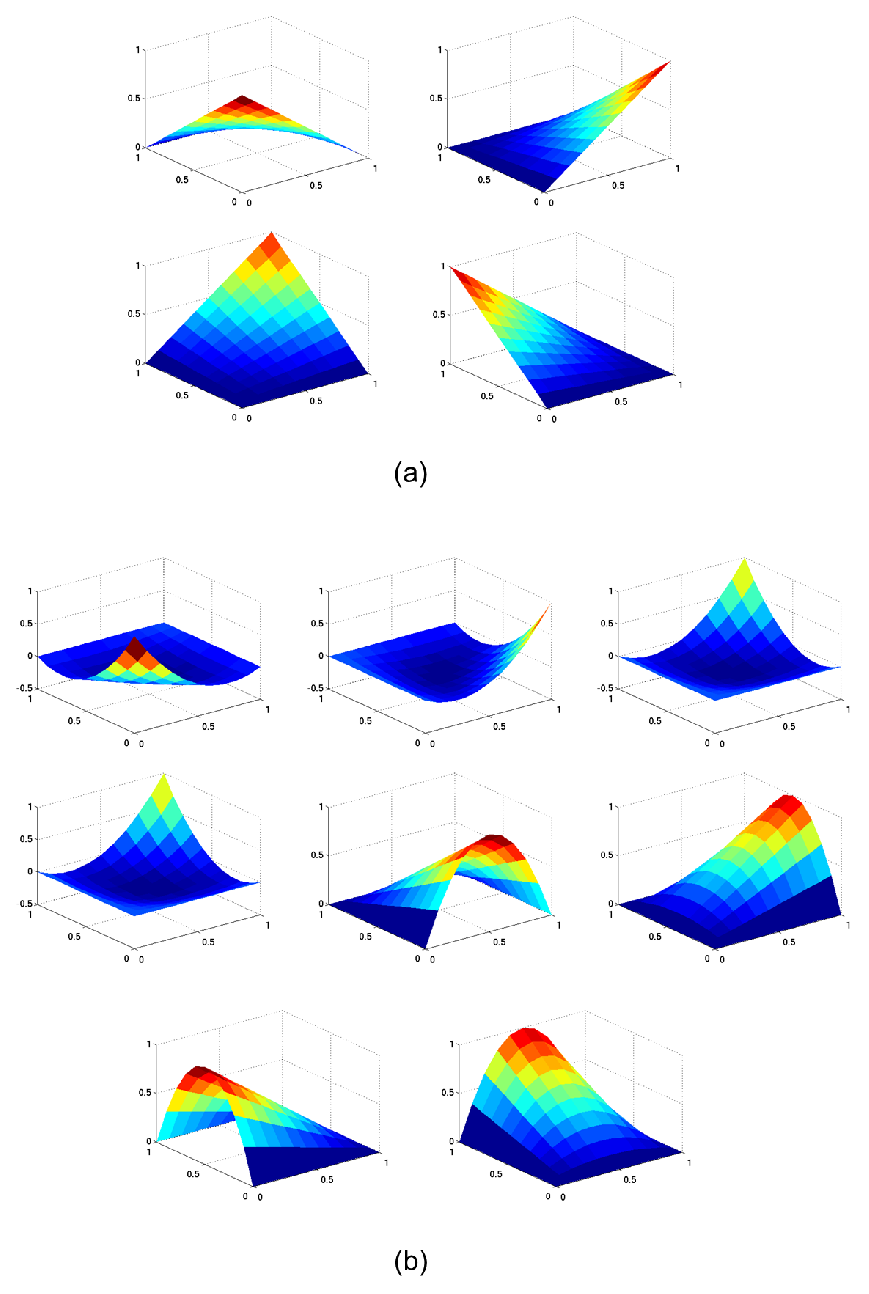
Regarding the basis functions, the concept for creation persists. The criteria for construction
should still be satisfied and they should be polynomials, but for this case in 2D and 3D
dimensions. The basis functions construction for 2D and 3D domains is rather
lengthy and cumbersome, however, well treated in a variety of textbooks [56][57].
Examples of basis functions for 2D domains with quadratic meshes are detailed in
Fig. 3.5.
 . As the number of partitions
increases, the amount of functions which are possible to represent the solution
(
. As the number of partitions
increases, the amount of functions which are possible to represent the solution
( dimension) also increases. As consequence, the quality of the approximation is
enhanced.
dimension) also increases. As consequence, the quality of the approximation is
enhanced.