
 |
|
||||
BiographyAlexander Scharinger was born in 1982 in Grieskirchen, Austria. He received a Bachelor's degree in Software & Information Engineering and a Master's degree in Logic and Computation from TU Wien in 2015 and 2018, respectively. He joined the Institute for Microelectronics in April 2019, where he is currently working on his doctoral degree within the scope of the Christian Doppler Laboratory for High Performance TCAD. His research interests include efficient algorithms and data structures for surface rate calculations, in particular ray tracing and stochastic sampling methods, for Process TCAD. |
|||||
Adaptive Importance Sampling for Top-Down Monte Carlo Flux Calculations
Modern three-dimensional feature scale topography simulators are able to describe many of the complex topological changes occurring during semiconductor manufacturing. For simulations of etching and deposition processes, particle flux distributions on the surface need to be known. This is most commonly achieved using a top-down Monte Carlo method that consists of sampling random particles from a given source distribution and computing their trajectories through the simulation domain. For each surface point, the local flux is calculated by summing up the number of particles hitting that surface point. An inherent downside with the conventional top-down Monte Carlo flux calculation is that it introduces numerical noise into the computed flux estimates. One way to deal with high levels of noise is to excessively increase the number of simulated particles. Naturally, this is not desirable since it increases the computation time accordingly.
We present an adaptive Monte Carlo importance sampling algorithm for top-down flux calculations illustrated in Fig. 1. In this algorithm, first a conventional Monte Carlo flux calculation using only a fraction of the total number of simulated particles is performed (Fig. 1a). This first stage yields a flux estimate for each surface element and a statistical relative error of the estimate (Fig. 1b). The second stage uses a small number of particles to track locations at the source, which produces particles that eventually will hit surface elements with high relative error (Fig. 1c). This stage generates a set of relevant locations at the particle source. A bivariate Gaussian Mixture Model is fitted to this set of relevant locations (Fig. 1d), which is then used to sample new random particle locations at the source employing Monte Carlo importance sampling (Fig. 1e).
The final results are a surface flux distribution and a corresponding distribution of relative errors (Fig. 1f). Fig. 2a shows a high aspect ratio test structure, which is especially prone to high levels of numerical noise and statistical relative errors. Using this test structure, we compare the relative errors of the flux values when using conventional sampling with 32 M (million) particles and the adaptive importance sampling algorithm using about 8 M particles for the first stage, about 100 k (thousand) particles for mapping out the relevant source locations and about 24 M particles for the importance sampling, totaling again 32 M particles. Fig. 2b shows the relative errors of the flux estimates using conventional sampling, and Fig. 2c shows the relative errors using the algorithm with adaptive importance sampling. Our approach reduces the statistical relative error in remote and obscured surface regions by about 33% without increasing the number of simulated particles.
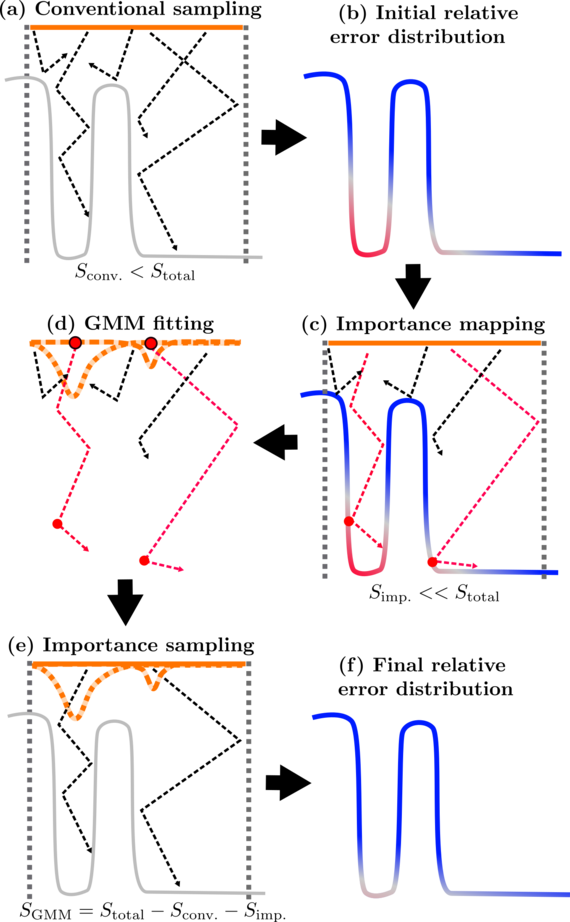
Fig. 1: Schematic view of the adaptive importance sampling algorithm. A fraction of the simulated particles is sampled conventionally in order to generate an initial distribution of statistical relative errors. This error distribution is used to identify highly relevant sample locations, which are used to fit a Gaussian Mixture Model (GMM). Finally, the majority of particles are generated using importance sampling based on the distribution of the GMM.
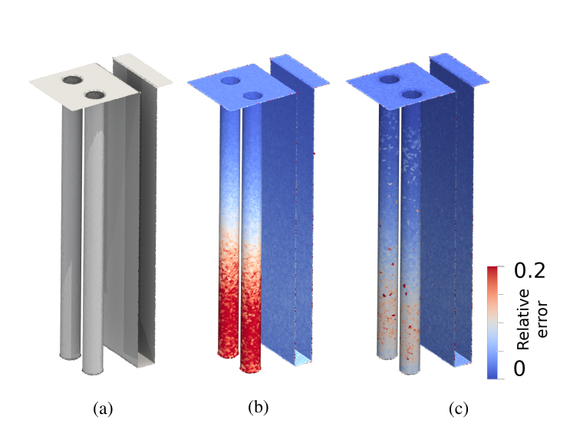
Fig. 2: High aspect ratio test structure consisting of about 40 k surface primitives: (a) the plain geometry; (b) the relative error of the surface flux distribution using 32 M conventionally sampled particles; and (c) the relative error of the surface flux distribution using 32 M particles sampled with the presented adaptive importance sampling algorithm.