|
|
|
|
Previous: 5. Optimization for TCAD Up: 5. Optimization for TCAD Next: 5.1.1 Inverse Modeling |
|
|
|
|
Previous: 5. Optimization for TCAD Up: 5. Optimization for TCAD Next: 5.1.1 Inverse Modeling |
The optimization field for TCAD applications [79] can be categorized into three major tasks. These are inverse modeling [80], calibration of simulator models [81,82] and the tuning of certain process parameters [83].
A TCAD optimization task is an iterative minimization or maximization
process, where the optimizer controls a set of free parameters of a model
within certain upper and lower bounds to minimize or maximize a given target. A
simulator that takes the model as input is used to compute an error
vector. The target ![]() is then computed as the quadratic mean of the
is then computed as the quadratic mean of the ![]() dimensional error vector
dimensional error vector ![]()
| (5.1) |
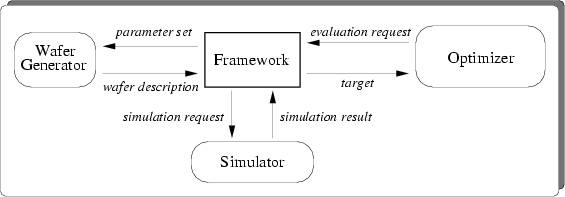
Several iterations are performed until a truncation criterion is reached. For the case of a local optimizer the criterion is usually a minimum change of the target value. For a global optimizer additional criteria like, e.g. a maximum iteration number might be defined. An optimization framework integrates optimizer and simulator and spreads the simulation jobs over a cluster of workstations. Fig. 5.1 depicts this scenario. Several concrete sub-problems of this abstract optimization task exists which are briefly sketched in the following sections.
|
|
|
|
Previous: 5. Optimization for TCAD Up: 5. Optimization for TCAD Next: 5.1.1 Inverse Modeling |