Next: 4.1.1 Closest Point Transformation
Up: 4. A Fast Level
Previous: 4. A Fast Level
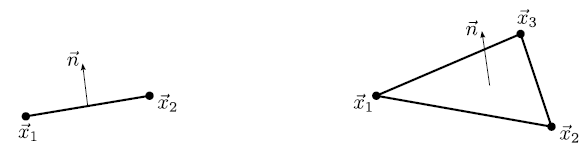
Dependent on the number of dimensions, the initial boundary is usually given as an oriented line segmentation or an oriented triangulation, respectively. The orientation of a line segment or a triangle is defined in this work as shown in Figure 4.1. The normal vector always points to the positive region of the LS function. Without loss of generality, grid point coordinates are assumed to be equal to their indices  . As a consequence, the grid spacing is unity (
. As a consequence, the grid spacing is unity (
 ).
).
Figure 4.1:
The orientation of the normal vector
 on a line segment and on a triangle as defined in this work with respect to the order of nodes
on a line segment and on a triangle as defined in this work with respect to the order of nodes
 .
.
|
|
Subsections
Next: 4.1.1 Closest Point Transformation
Up: 4. A Fast Level
Previous: 4. A Fast Level
Otmar Ertl: Numerical Methods for Topography Simulation