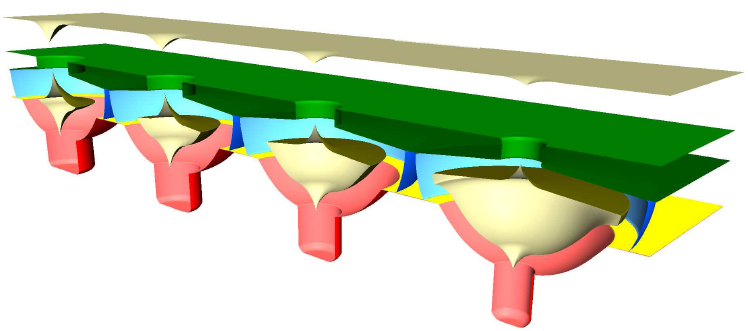
The presented void detection algorithm can be applied to isotropic deposition in order to ensure that voids do not change from the point in time they are formed. At every time step the void detection algorithm is used to determine all active grid points which must not change in order to preserve the shape of voids. The LS values of all other active grid points are updated in time. Figure 4.18 shows an example, where the void detection algorithm has been applied during a deposition process. Since the hole diameters are not equal, the cavities are disconnected from the source at different times.
|
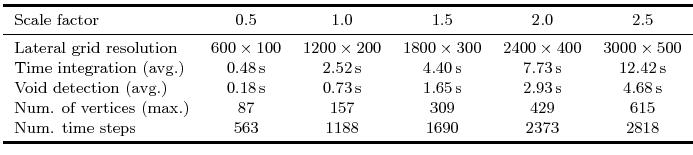
Table 4.3 lists the average calculation times for time integration and void detection for the isotropic deposition process. Furthermore, the number of vertices of the maximum reduced graph during the simulation is also given. Obviously, the number of vertices is very small compared to the number of defined grid points, which is at least in the order of the lateral grid extensions. Hence, the memory consumption of the reduced graph can be neglected, as already stated previously.