|
|
|
|
Previous: 4.2.1 Implementation Details Up: 4.2.1 Implementation Details Next: 4.2.1.2 A Posteriori Mesh Refinement |
|
|
|
|
Previous: 4.2.1 Implementation Details Up: 4.2.1 Implementation Details Next: 4.2.1.2 A Posteriori Mesh Refinement |
The most important metrics of a mesh refinement algorithm are locality and preservation of the quality of the elements. Recursive and iterative refinement algorithms for three-dimensional tetrahedral meshes were introduced in [65] and [66], respectively. Both algorithms are based on the intersection of an edge of a tetrahedron and result in the very same (refined) tetrahedralization. They take into account the history of refinement steps and work in the following way:
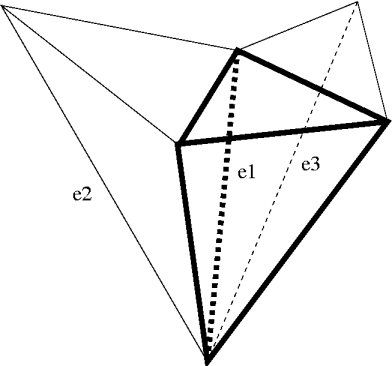
The refinement algorithm that is implemented in our simulator is a simplification of the above mentioned algorithms. For sake of simplicity it always recursively refines the longest edge of the tetrahedron under consideration. Fig. 4.6, Fig. 4.7, and Fig. 4.8 illustrate the algorithm.
Fig. 4.6 depicts the initial input mesh with one tetrahedron
marked for refinement (drawn in thick lines). The edges ![]() ,
, ![]() , and
, and ![]() depict the longest edge of every tetrahedron respectively. Both edges
depict the longest edge of every tetrahedron respectively. Both edges ![]() and
and
![]() are longer as edge
are longer as edge ![]() , thus the neighboring elements are refined
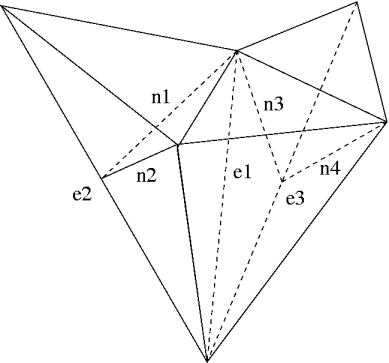
recursively. Fig. 4.7 illustrates the case after two recursion
steps. New tetrahedrons and edges (
, thus the neighboring elements are refined
recursively. Fig. 4.7 illustrates the case after two recursion
steps. New tetrahedrons and edges (![]() to
to ![]() ) were introduced by splitting
along edges
) were introduced by splitting
along edges ![]() and
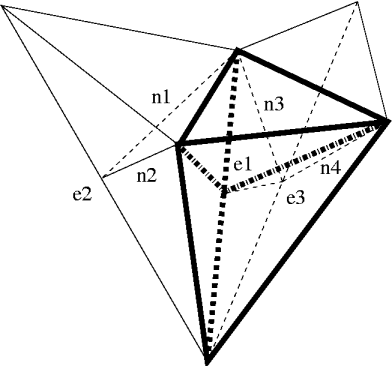
and ![]() of the original mesh. Fig. 4.8 shows the
final result of the refinement step. The tetrahedrons that result by splitting
the originally marked element are drawn in thick lines. In this example a total
of
of the original mesh. Fig. 4.8 shows the
final result of the refinement step. The tetrahedrons that result by splitting
the originally marked element are drawn in thick lines. In this example a total
of ![]() new tetrahedrons was generated. The recursion is guaranteed to stop,
although in the worst case every tetrahedron of the mesh will be
refined. However, the application of the algorithm in two and three dimensions
showed very good locality (see Fig. 4.12 and Fig. 4.13)
which justifies the usage of this simple refinement mechanism.
new tetrahedrons was generated. The recursion is guaranteed to stop,
although in the worst case every tetrahedron of the mesh will be
refined. However, the application of the algorithm in two and three dimensions
showed very good locality (see Fig. 4.12 and Fig. 4.13)
which justifies the usage of this simple refinement mechanism.
Since the longest edge of a tetrahedron implies the biggest dihedral angle, one could suspect that a bisection of the longest edge of any tetrahedron allows to make the resulting mesh conforming to the angle criterion by an iterative application. Unfortunately, this is not the case, since geometrical similarities can not be generally avoided for successive refinement steps even if all edges violating the angle criterion are refined. Fig. 4.9

|
2003-03-27