Next: 4.7.1 Directional Etching
Up: 4. A Fast Level
Previous: 4.6.3 Isotropic Material Dependent
Some processes are characterized by almost unidirectional and normal incident particle transport from the source plane to the surface. In this case the H-RLE data structure can be useful for the computation of surface velocities for the active grid points. The surface velocity field at active grid points is usually obtained by taking the surface velocity of the closest surface point. The surface velocity of a surface point depends on the visibility from the particle source along the incidence direction. Instead of determining the visibilities for surface points and mapping the information to the active grid points, it is possible to compute the visibility information directly for all active grid points.
In the following section, an active grid point is called visible, if the corresponding closest surface point is visible. Furthermore, it is assumed that the incidence direction is equal to the positive  -direction. Then, an active grid point
-direction. Then, an active grid point  can be regarded as visible, if the LS values of all grid points
can be regarded as visible, if the LS values of all grid points
 with
with  are larger than or equal to that of grid point
are larger than or equal to that of grid point
 is visible is visible |
(4.29) |
Thereby, the LS values of positive and negative undefined grid points are again assumed to be  , respectively. Figure 4.13 illustrates by means of an example, which active grid points are visible. Taking advantage of the lexicographical ordering, it is sufficient to iterate once over the H-RLE data structure to determine the visibilities for all active grid points. Hence, this visibility test is of optimal complexity
, respectively. Figure 4.13 illustrates by means of an example, which active grid points are visible. Taking advantage of the lexicographical ordering, it is sufficient to iterate once over the H-RLE data structure to determine the visibilities for all active grid points. Hence, this visibility test is of optimal complexity
 , where
, where
 denotes again the number of defined grid points, which is proportional to the surface size measured in grid spacings.
denotes again the number of defined grid points, which is proportional to the surface size measured in grid spacings.
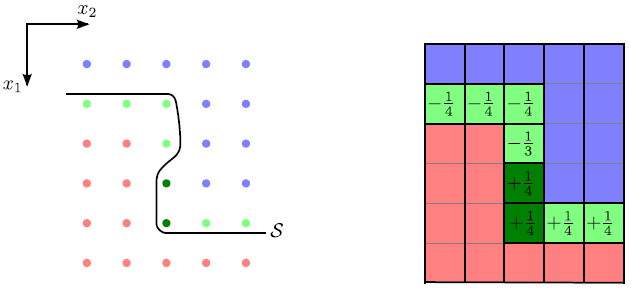
Figure 4.13:
A surface
 and its H-RLE representation are shown. In this example, the LS values are only defined for the active grid points. Positive (blue) and negative (red) runs of undefined grid points are assumed to have LS values
and its H-RLE representation are shown. In this example, the LS values are only defined for the active grid points. Positive (blue) and negative (red) runs of undefined grid points are assumed to have LS values  and
and  , respectively. The dark green grid points do not fulfill the visibility criterion.
, respectively. The dark green grid points do not fulfill the visibility criterion.
|
|
Subsections
Next: 4.7.1 Directional Etching
Up: 4. A Fast Level
Previous: 4.6.3 Isotropic Material Dependent
Otmar Ertl: Numerical Methods for Topography Simulation