The LS method requires a surface velocity field which is commonly obtained by extrapolating the velocities computed on the surface (compare Section 3.2.4). If the active grid points are very close to the surface, which is the case for the sparse field method, it is possible to calculate the surface rates directly for those grid points [112,A13]. In this way the extrapolation procedure can be avoided and no extra memory is needed to store the velocities for the discretized surface.
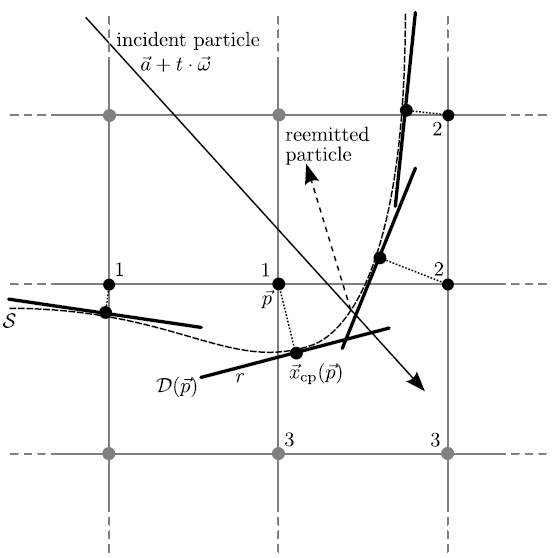
As proposed in [A16,A20] tangential disks
![]() can be defined for all points on the surface, which are closest to any active grid points
can be defined for all points on the surface, which are closest to any active grid points
![]() . Hence, for each active grid point
. Hence, for each active grid point ![]() a disk is defined which serves as a neighborhood for its corresponding closest surface point
a disk is defined which serves as a neighborhood for its corresponding closest surface point
![]() . The closest surface point
. The closest surface point
![]() , which is also the midpoint of the tangential disk
, which is also the midpoint of the tangential disk
![]() , is approximated using (3.23). The orientation of the disk is given by the surface normal which is approximated by
, is approximated using (3.23). The orientation of the disk is given by the surface normal which is approximated by
![]() as defined in (3.22). Hence, the tangential disk
as defined in (3.22). Hence, the tangential disk
![]() is described by
is described by
| (5.19) |
|
The area of the disks is
![]() or in case of two dimensions, where the disks correspond to tangential segments,
or in case of two dimensions, where the disks correspond to tangential segments,
![]() . Hence, the choice of the disk radius influences the statistical accuracy. Larger radii give better statistics at the expense of the spatial resolution which should be of same magnitude as the resolution of the surface. Hence the disk radius should be in the order of the grid spacing which was assumed to be unity.
. Hence, the choice of the disk radius influences the statistical accuracy. Larger radii give better statistics at the expense of the spatial resolution which should be of same magnitude as the resolution of the surface. Hence the disk radius should be in the order of the grid spacing which was assumed to be unity.
In [A20] an upper limit for the radius was suggested. Within the sparse field method
![]() holds for all active grid points. Furthermore, the approximation for the gradient is almost always larger than 1, thus
holds for all active grid points. Furthermore, the approximation for the gradient is almost always larger than 1, thus
![]() . This gives an upper limit for the distance to the approximated closest surface point
. This gives an upper limit for the distance to the approximated closest surface point
![]() according to (3.23). If the radius is chosen in such a manner that
according to (3.23). If the radius is chosen in such a manner that
 |
(5.20) |
This way the computational effort for ray-disk intersection tests is minimized. Within a grid cell only the ![]() corner grid points have to be checked, if they are active, and if their corresponding tangential disks
corner grid points have to be checked, if they are active, and if their corresponding tangential disks
![]() are intersected. Hence, the same data structure can be used as the one needed for the multi-linear interpolation for the surface intersection test, which requires links to all its corners in order to access the corresponding LS values.
are intersected. Hence, the same data structure can be used as the one needed for the multi-linear interpolation for the surface intersection test, which requires links to all its corners in order to access the corresponding LS values.