In Section 4.2 an exceptional example was presented where a
one-dimensional diffusion problem was calculated on a three-dimensional test
structure. In the following also a diffusion example is presented for which
the solution is not available analytically. Again a Hessian refinement method, as
described in Section 3.4 in combination with the error
estimator presented in Section 4.1, is used to improve the overall
accuracy of the simulation.
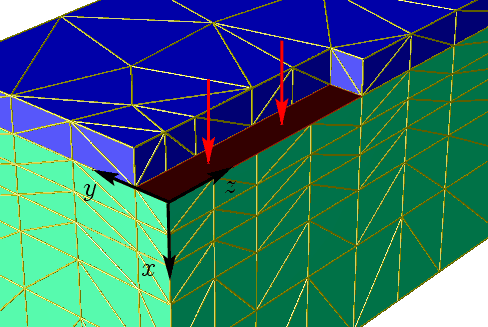 |
Figure 4.6 shows the simulation setup where a cuboid block (green
colored) is almost completely covered by a mask (blue colored) on top. Only a
small band which is colored dark red is exposed to an ambient gaseous dopant
source. The underlying initial mesh is a coarse, fairly isotropic mesh. At the
upturn open part of the structure (colored dark red), a boundary condition with
a non-vanishing derivative of the dopant concentration was applied, marked
with ![]() -directional red arrows. This setup illustrates
a
-directional red arrows. This setup illustrates
a ![]() -directional flux where dopants
continuously arrives at the surface such that the concentration gradient
remains constant at the surface [82].
-directional flux where dopants
continuously arrives at the surface such that the concentration gradient
remains constant at the surface [82].
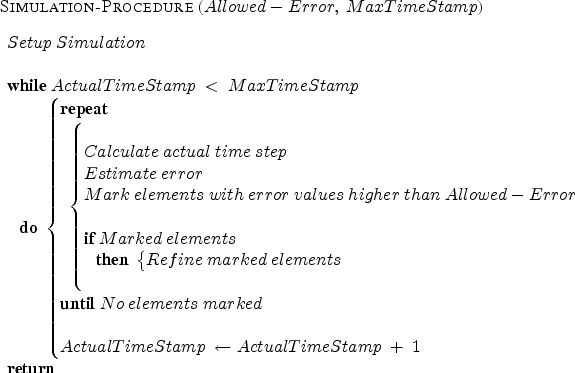
For the simulation procedure itself a combination of Hessian refinement and
error estimation was applied. After every time step of the simulation the
accuracy is checked with the error estimator and a refinement cycle is
introduced on demand. Table 4.1 gives a pseudo code fragment which
illustrates such a simulation procedure. The presented simulation cycle
guarantees also that only regions of high error are refined, because only
tetrahedra which are marked by the error estimator are influenced by the
Hessian refinement, other regions are completely untouched.
The Hessian refinement produces
anisotropic mesh elements so that in the direction of high gradient variations
a higher mesh density is produced, other directions are kept mostly at the
initial granularity. This method keeps also the overall amount of mesh
elements small compared to an isotropic mesh refinement, which is important for
the performance of three-dimensional diffusion simulations.
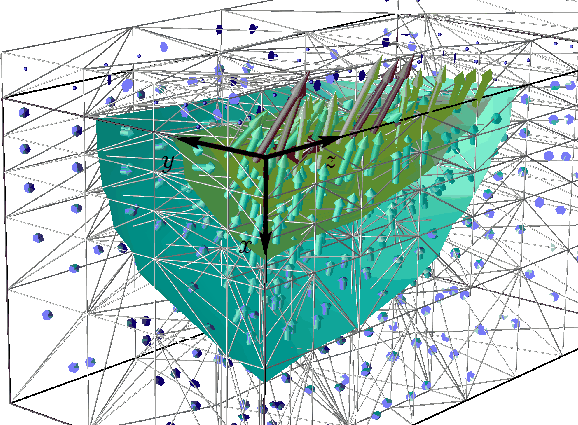 |
Figure 4.7 shows the corresponding gradient field and iso-surfaces
of the dopant concentration after a couple of refinement and error estimation
cycles. As depicted in Table 4.1 it is possible that for one time
step several refinement procedures are carried out. The gradient vectors are
calculated for every tetrahedron using Equation (3.16). The
orientation of the gradient points towards higher concentration values. The
direction is perpendicular to the iso-surfaces of the dopant concentration. The
gradient field varies much stronger along the ![]() - and the
- and the ![]() -direction of
the open band, which forces a higher mesh density along these directions. The
variation along the
-direction of
the open band, which forces a higher mesh density along these directions. The
variation along the ![]() -direction is quite small and the granularity of the
initial mesh should be kept.
-direction is quite small and the granularity of the
initial mesh should be kept.
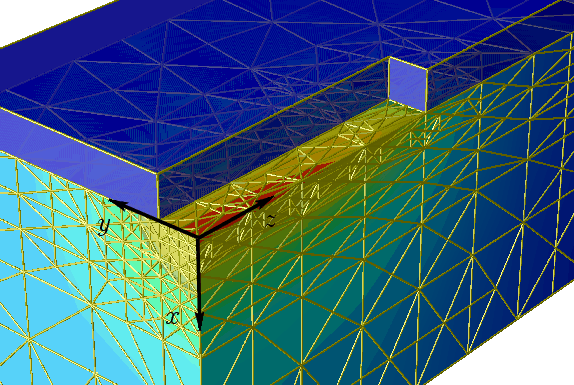
As shown in Figure 4.8 the refinement does not alter the edge
length along the ![]() -direction of the cuboid, whereas along the short sides
a much higher mesh density arises and the resolution for the diffusion
calculation is increased. Other parts of the structure are completely
untouched so that the overall number of mesh elements is kept fairly small
which is important for the performance of the diffusion simulation.
-direction of the cuboid, whereas along the short sides
a much higher mesh density arises and the resolution for the diffusion
calculation is increased. Other parts of the structure are completely
untouched so that the overall number of mesh elements is kept fairly small
which is important for the performance of the diffusion simulation.
 |